#include <colision.h>
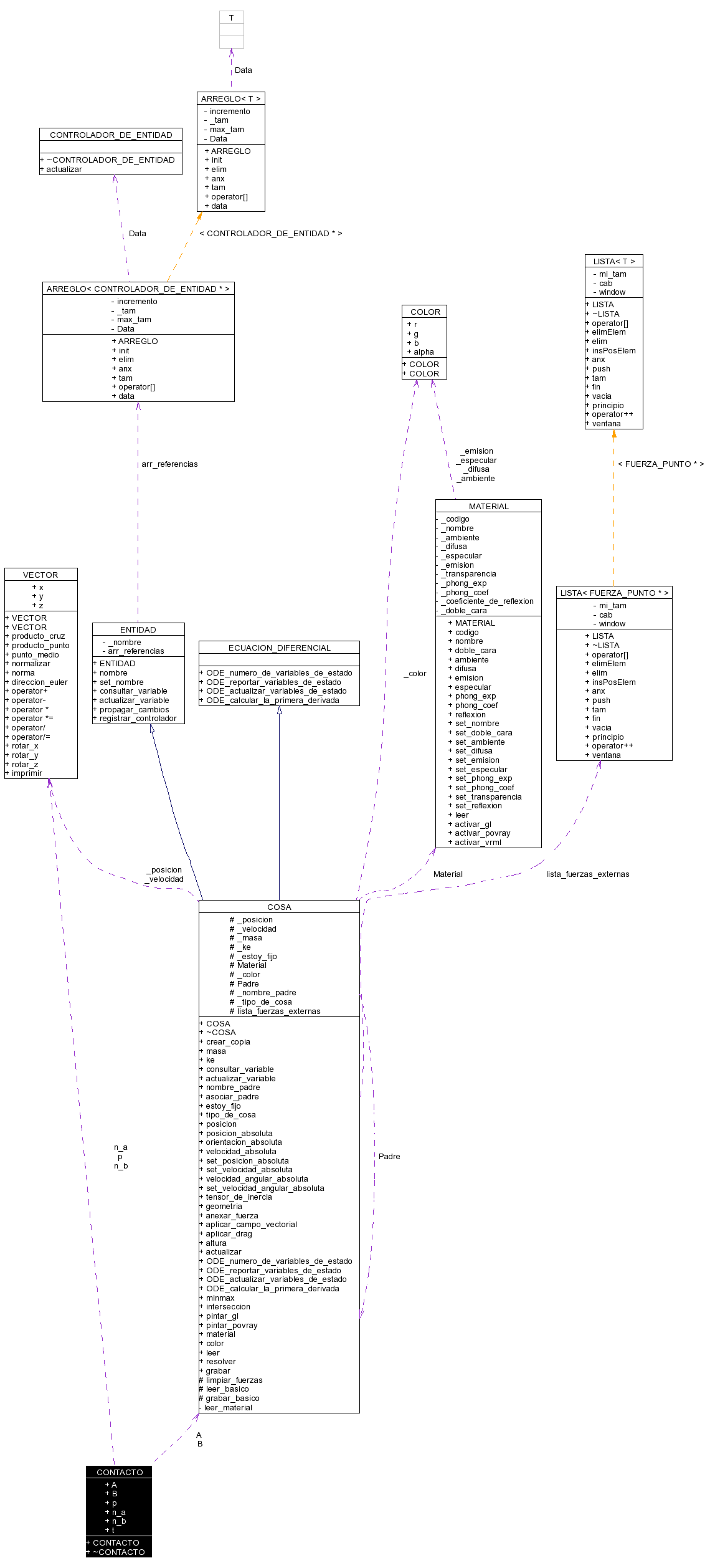
Diagrama de colaboración para CONTACTO:
Métodos públicos | |
| CONTACTO () | |
| ~CONTACTO () | |
Atributos públicos | |
| COSA * | A |
| COSA * | B |
| VECTOR | p |
| VECTOR | n_a |
| VECTOR | n_b |
| double | t |
Definición en la línea 46 del archivo colision.h.
|
|
Definición en la línea 83 del archivo colision.C. |
|
|
Definición en la línea 88 del archivo colision.C. |
|
|
Definición en la línea 53 del archivo colision.h. Referenciado por detector_colision_puntual_rigida(), y MANEJADOR_CONFLICTOS_COLISION::resolver_conflictos(). |
|
|
Definición en la línea 54 del archivo colision.h. Referenciado por detector_colision_puntual_rigida(), y MANEJADOR_CONFLICTOS_COLISION::resolver_conflictos(). |
|
|
Definición en la línea 61 del archivo colision.h. Referenciado por detector_colision_puntual_rigida(). |
|
|
Definición en la línea 62 del archivo colision.h. Referenciado por detector_colision_puntual_rigida(), y MANEJADOR_CONFLICTOS_COLISION::resolver_conflictos(). |
|
|
Definición en la línea 57 del archivo colision.h. Referenciado por detector_colision_puntual_rigida(), y MANEJADOR_CONFLICTOS_COLISION::resolver_conflictos(). |
|
|
Definición en la línea 63 del archivo colision.h. Referenciado por detector_colision_puntual_rigida(). |