#include <cosa.h>
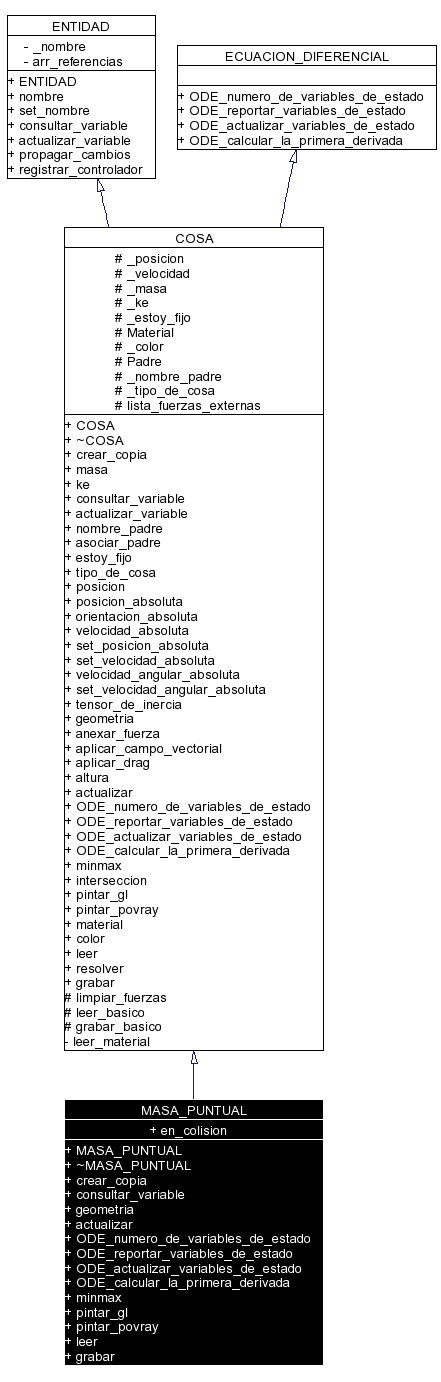
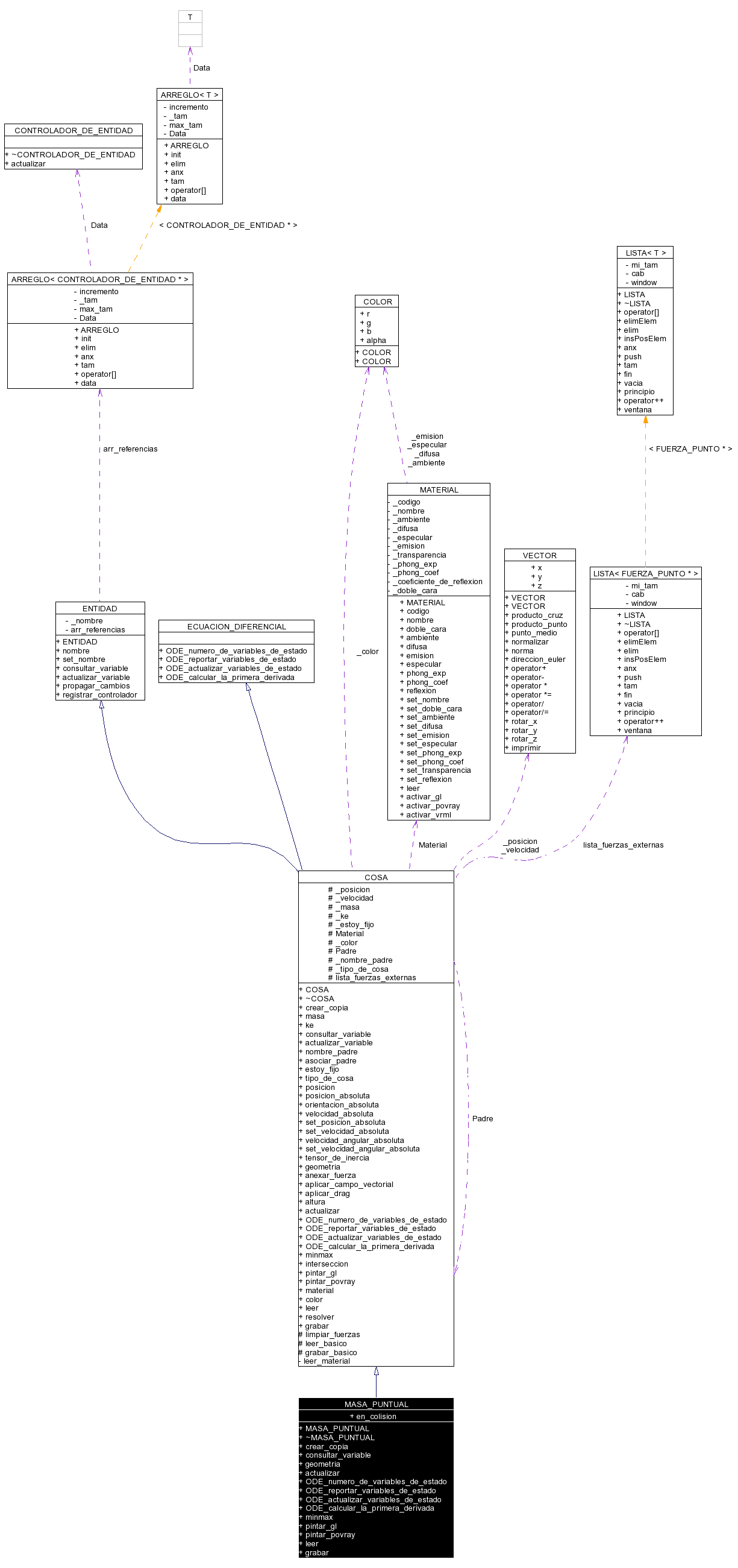
Diagrama de herencias de MASA_PUNTUAL
Métodos públicos | |
| MASA_PUNTUAL () | |
| virtual | ~MASA_PUNTUAL () |
| virtual COSA * | crear_copia (void) |
| OJO: Redefine la version de la clase COSA. | |
| BOOLEAN | consultar_variable (const char *nombre_variable, int &tipo, void **ref) |
| < Funcion de introspeccion | |
| GEOMETRIA * | geometria (void) |
| void | actualizar (double delta_t) |
| int | ODE_numero_de_variables_de_estado (void) |
| void | ODE_reportar_variables_de_estado (double *Datos) |
| void | ODE_actualizar_variables_de_estado (double *Datos) |
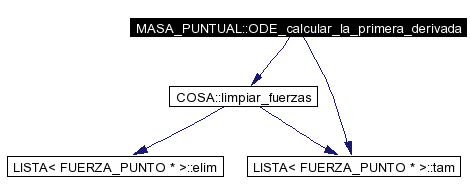
| void | ODE_calcular_la_primera_derivada (double *Datos) |
| OJO: para el vector de posicion `X`, el vector de velocidad `V` y el vector acumulado de fuerza `V` se tiene, con la masa `m` y `delta_t`: Vf ::= Vi + (delta_t/m)F ::= Vi + delta_t * (DERIV(Vi)) y como F = m*A = m*DERIV(V), DERIV(V) ::= F/m. | |
| void | minmax (VECTOR *min, VECTOR *max) |
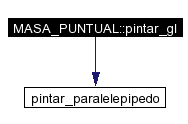
| void | pintar_gl (CALIDAD_VISUAL *Calidad, CAMARA *Camara) |
| Notese que es mas costosa una verificacion de min-max que pintar un punto... | |
| void | pintar_povray (FILE *fd) |
| BOOLEAN | leer (TOKENIZADOR *Sabiondo) |
| void | grabar (FILE *fd) |
Atributos públicos | |
| BOOLEAN | en_colision |
Amigas | |
| class | TELA |
Dado que la geometria es trivial, no se representa explicitamente a diferencia de las demas cosas (i.e. esta clase no contiene un atributo de tipo `GEOMETRIA`).
Definición en la línea 260 del archivo cosa.h.
|
|
Definición en la línea 48 del archivo masa_puntual.C. References COSA::_tipo_de_cosa, CC_MASA_PUNTUAL, y en_colision. |
|
|
Definición en la línea 54 del archivo masa_puntual.C. References COSA::_nombre_padre. |
|
|
Implements COSA. Definición en la línea 155 del archivo masa_puntual.C. References SOLVER_EULER::ejecutar_solucion(). Referenciado por TELA::actualizar(). |
Here is the call graph for this function:

|
||||||||||||||||
|
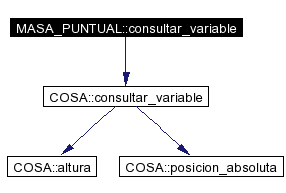
< Funcion de introspeccion Notese que como el metodo es virtual, puede ser redefinido por las clases que hereden de COSA. Es util llamar este metodo dentro de sus redefiniciones, usando COSA::demevariable(); OJO: En este metodo se esta violando el principio de encapsulamiento de datos! Esto debe redisennarse! Reimplementado de COSA. Definición en la línea 60 del archivo masa_puntual.C. References COSA::_posicion, COSA::consultar_variable(), y T_VECTOR. |
Here is the call graph for this function:
|
|
OJO: Redefine la version de la clase COSA.
Reimplementado de COSA. Definición en la línea 76 del archivo masa_puntual.C. |
|
|
Implements COSA. Definición en la línea 90 del archivo masa_puntual.C. |
|
|
Implements COSA. Definición en la línea 163 del archivo masa_puntual.C. |
|
|
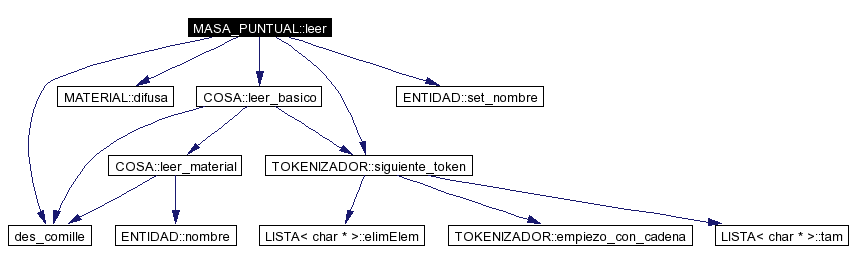
Implements COSA. Definición en la línea 169 del archivo masa_puntual.C. References COSA::_color, BOOLEAN, des_comille(), MATERIAL::difusa(), COSA::leer_basico(), COSA::Material, ENTIDAD::set_nombre(), TOKENIZADOR::siguiente_token(), TK_ABRIR, TK_CADENA, TK_CERRAR, TK_DESCONOCIDO, y TK_IDENTIFICADOR. |
Here is the call graph for this function:
|
||||||||||||
|
Implements COSA. Definición en la línea 96 del archivo masa_puntual.C. References COSA::_posicion, VECTOR::x, VECTOR::y, y VECTOR::z. |
|
|
Implements COSA. Definición en la línea 233 del archivo masa_puntual.C. References COSA::_estoy_fijo, COSA::_posicion, COSA::_velocidad, VECTOR::x, VECTOR::y, y VECTOR::z. |
|
|
OJO: para el vector de posicion `X`, el vector de velocidad `V` y el vector acumulado de fuerza `V` se tiene, con la masa `m` y `delta_t`: Vf ::= Vi + (delta_t/m)F ::= Vi + delta_t * (DERIV(Vi)) y como F = m*A = m*DERIV(V), DERIV(V) ::= F/m. Por otro lado, se tiene un razonamiento similar para derivar la ecuacion clasica de Xf = Xi + Vi*delta_t Implements COSA. Definición en la línea 246 del archivo masa_puntual.C. References COSA::_estoy_fijo, COSA::_masa, COSA::_velocidad, COSA::limpiar_fuerzas(), COSA::lista_fuerzas_externas, LISTA< FUERZA_PUNTO * >::tam(), VECTOR::x, VECTOR::y, y VECTOR::z. |
Here is the call graph for this function:
|
|
Implements COSA. Definición en la línea 213 del archivo masa_puntual.C. References COSA::_estoy_fijo. |
|
|
Implements COSA. Definición en la línea 220 del archivo masa_puntual.C. References COSA::_estoy_fijo, COSA::_posicion, COSA::_velocidad, VECTOR::x, VECTOR::y, y VECTOR::z. |
|
||||||||||||
|
Notese que es mas costosa una verificacion de min-max que pintar un punto... asi es que la camara no se usa para chequear si esta masa puntual se pinta o no (i.e. siempre se pinta). PRE: GL esta en GL_MODELVIEW Implements COSA. Definición en la línea 108 del archivo masa_puntual.C. References COSA::_color, COSA::_posicion, COLOR::b, en_colision, COLOR::g, pintar_paralelepipedo(), COLOR::r, VECTOR::x, VECTOR::y, y VECTOR::z. Referenciado por TELA::pintar_gl(). |
Here is the call graph for this function:
|
|
Reimplementado de COSA. Definición en la línea 140 del archivo masa_puntual.C. References COSA::_color, COSA::_posicion, COLOR::b, COLOR::g, COLOR::r, VECTOR::x, VECTOR::y, y VECTOR::z. |
|
|
|
|
|
Definición en la línea 269 del archivo cosa.h. Referenciado por MASA_PUNTUAL(), y pintar_gl(). |