#include <glove.h>
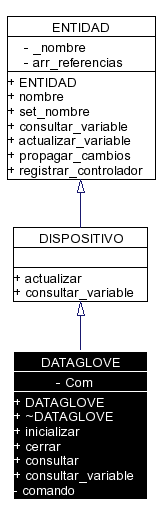
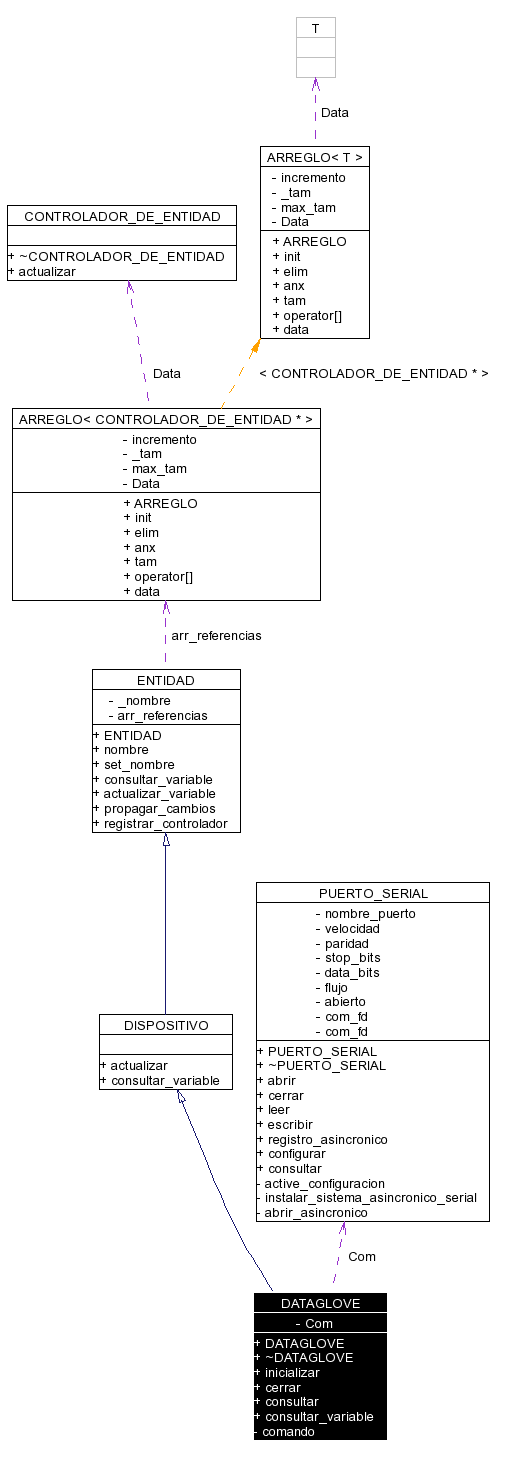
Diagrama de herencias de DATAGLOVE
Métodos públicos | |
| DATAGLOVE () | |
| virtual | ~DATAGLOVE () |
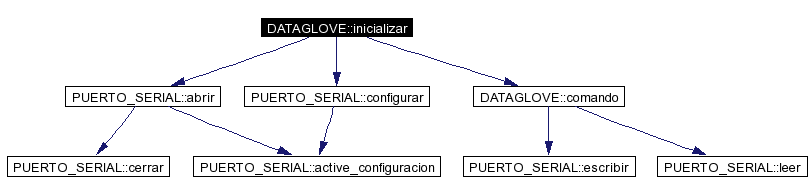
| BOOLEAN | inicializar (char *Port) |
| Dado un nombre de puerto, abre una conexion con el puerto serial y verifica la existencia del Dataglove. | |
| void | cerrar (void) |
| Libera el puerto serial utilizado para la comunicacion con el dataglove. | |
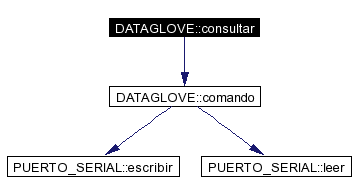
| BOOLEAN | consultar (unsigned char *Pitch, unsigned char *Roll, unsigned char *f1, unsigned char *f2, unsigned char *f3, unsigned char *f4, unsigned char *f5) |
| Consulta el estado actual del dataglove, reintentando algunas veces la conexion si es fallida. | |
| BOOLEAN | consultar_variable (const char *nombre_variable, int &tipo, void **ref) |
| Éste método, junto con `actualizar_variable` es el núcleo del esquema de introspección AQUYNZA. | |
Métodos privados | |
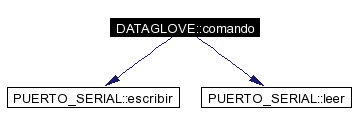
| int | comando (char comando, char *buffer, int tam_buffer) |
| Envia un caracter de comando al dataglove, y escribe en 'buffer' la respuesta al comando que devuelve el hardware. | |
Atributos privados | |
| PUERTO_SERIAL * | Com |
|
|
Definición en la línea 33 del archivo glove.C. References Com. |
|
|
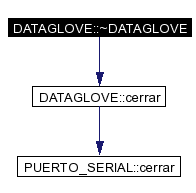
Definición en la línea 38 del archivo glove.C. References cerrar(). |
Here is the call graph for this function:
|
|
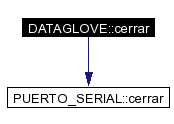
Libera el puerto serial utilizado para la comunicacion con el dataglove.
Definición en la línea 131 del archivo glove.C. References PUERTO_SERIAL::cerrar(), y Com. Referenciado por ~DATAGLOVE(). |
Here is the call graph for this function:
|
||||||||||||||||
|
Envia un caracter de comando al dataglove, y escribe en 'buffer' la respuesta al comando que devuelve el hardware. En caso de no recibir nada del guante, reintenta MAXCOM veces la conexion. Notese que quien llama esta funcion debe saber a-priori el tamanno de los datos que tendra la respuesta devuelta por el guante. Retorna el numero de caracteres del mensaje devuelto por el guante. PRE: Com != NULL Definición en la línea 56 del archivo glove.C. References Com, PUERTO_SERIAL::escribir(), y PUERTO_SERIAL::leer(). Referenciado por consultar(), y inicializar(). |
Here is the call graph for this function:
|
||||||||||||||||||||||||||||||||
|
Consulta el estado actual del dataglove, reintentando algunas veces la conexion si es fallida. Las variables de retorno son: Pitch Roll f1, ..., f5: Valores para cada uno de los dedos. Notese que para un guante de la mano derecha se tiene que: f1 es el dedo pulgar f2 es el dedo indice f3 es el dedo medio f4 es el dedo anular f5 es el dedo chiquito (mennique) |
Here is the call graph for this function:
|
||||||||||||||||
|
Éste método, junto con `actualizar_variable` es el núcleo del esquema de introspección AQUYNZA. La introspección permite consultar y/o actualizar cualquier variable de cualquier tipo mediante una interfaz unificada. Éste método retorna TRUE si la operación de consulta en introspección fue válida o FALSE si no (ya sea porque el tipo de datos era incorrecto o el nombre de variable suministrado no existe dentro de la clase). Éste método deberá ser sobrecargado por las clases que se deseen entren al esquema de introspección AQUYNZA (y las cuales heredarán de ésta clase). El comportamiento por defecto es tener la introspección desactivada (siempre retornar FALSE). Implements DISPOSITIVO. |
|
|
Dado un nombre de puerto, abre una conexion con el puerto serial y verifica la existencia del Dataglove. Si todo sale bien retorna TRUE y si algo falla retorna FALSE. Definición en la línea 81 del archivo glove.C. References PUERTO_SERIAL::abrir(), Com, comando(), PUERTO_SERIAL::configurar(), PSD8, PSF_NONE, PSP_NONE, PSS_UNO, y PSV19200. |
Here is the call graph for this function:
|
|
Definición en la línea 32 del archivo glove.h. Referenciado por cerrar(), comando(), consultar(), DATAGLOVE(), y inicializar(). |