#include <quaternion.h>
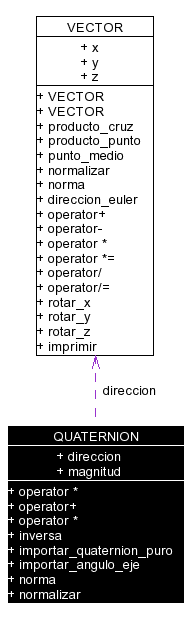
Diagrama de colaboración para QUATERNION:
Métodos públicos | |
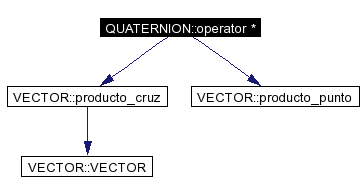
| QUATERNION | operator * (QUATERNION a) |
| Multiplicacion de quaternions: qq´ = [ww´ - v · v´, v x v´ + wv´ +w´v] (· is vector dot product and x is vector cross product); Note: qq´ ? q´q. | |
| QUATERNION | operator+ (QUATERNION a) |
| Suma de quaternions: q + q´ = [w + w´, v + v´]. | |
| QUATERNION | operator * (double n) |
| Multiplicacion de un quaternion con un escalar: OJO: Se multiplica tanto la parte escalar como la parte vector del quaternion! Tenga cuidado de no confundir eso! | |
| QUATERNION | inversa (void) |
| OJO: La inversa de un quaternion [a0, (a1, a2, a3)] es. | |
| void | importar_quaternion_puro (VECTOR v) |
| void | importar_angulo_eje (double angulo, VECTOR eje) |
| Este metodo construye un QUATERNION unitario a partir de una orientacion especificada como un par angulo/eje de rotacion. | |
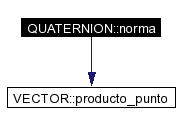
| double | norma (void) |
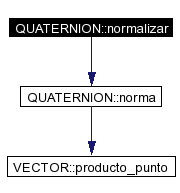
| void | normalizar (void) |
Atributos públicos | |
| VECTOR | direccion |
| double | magnitud |
2: Issue 26.
Definición en la línea 28 del archivo quaternion.h.
|
||||||||||||
|
Este metodo construye un QUATERNION unitario a partir de una orientacion especificada como un par angulo/eje de rotacion. Es importante notar que AQUYNZA utiliza la representacion angulo/eje para las orientaciones, asi que NO SON QUATERNIONS UNITARIOS los que se encuentran en los archivos aqz. Definición en la línea 66 del archivo quaternion.h. References direccion, y magnitud. Referenciado por CAMARA::CAMARA(), COSA_RIGIDA::COSA_RIGIDA(), LUZ::leer(), CAMARA::leer(), y COSA_RIGIDA::leer_rigida(). |
|
|
Definición en la línea 165 del archivo quaternion.h. References direccion, y magnitud. Referenciado por COSA_RIGIDA::ODE_calcular_la_primera_derivada(). |
|
|
OJO: La inversa de un quaternion [a0, (a1, a2, a3)] es. [a0,(-a1,-a2,-a3)] ---------------------- a0^2+a1^2+a2^2+a3^3 Definición en la línea 141 del archivo quaternion.h. References direccion, inversa(), magnitud, VECTOR::x, VECTOR::y, y VECTOR::z. Referenciado por inversa(). |
Here is the call graph for this function:

|
|
Definición en la línea 172 del archivo quaternion.h. References direccion, magnitud, y VECTOR::producto_punto(). Referenciado por normalizar(). |
Here is the call graph for this function:
|
|
Definición en la línea 178 del archivo quaternion.h. References direccion, magnitud, y norma(). Referenciado por MATRIZ_4x4::exportar_angulos_euler(), COSA_RIGIDA::ODE_actualizar_variables_de_estado(), COSA_RIGIDA::orientacion_absoluta(), COSA::orientacion_absoluta(), y CAMARA::procesar_mouse(). |
Here is the call graph for this function:
|
|
Multiplicacion de un quaternion con un escalar: OJO: Se multiplica tanto la parte escalar como la parte vector del quaternion! Tenga cuidado de no confundir eso!
Definición en la línea 125 del archivo quaternion.h. |
|
|
Multiplicacion de quaternions: qq´ = [ww´ - v · v´, v x v´ + wv´ +w´v] (· is vector dot product and x is vector cross product); Note: qq´ ? q´q.
Definición en la línea 92 del archivo quaternion.h. References direccion, magnitud, VECTOR::producto_cruz(), y VECTOR::producto_punto(). |
Here is the call graph for this function:
|
|
Suma de quaternions: q + q´ = [w + w´, v + v´].
Definición en la línea 110 del archivo quaternion.h. |
|
|