#include <controlador.h>
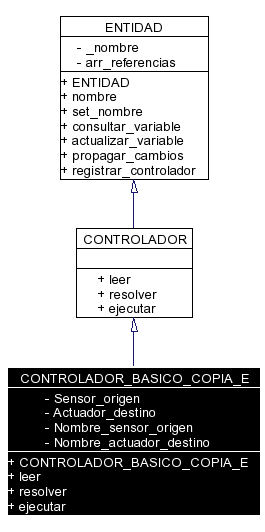
Diagrama de herencias de CONTROLADOR_BASICO_COPIA_E
Métodos públicos | |
| CONTROLADOR_BASICO_COPIA_E () | |
| La constructora desactiva todas las propiedades del controlador. | |
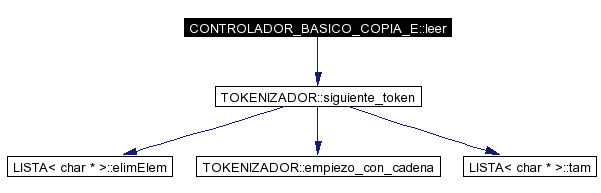
| BOOLEAN | leer (TOKENIZADOR *Sabiondo) |
| Lee la configuracion del controlador a partir de un archivo .aqz. | |
| BOOLEAN | resolver (LISTA< SENSOR * > *sensores, LISTA< ACTUADOR * > *actuadores) |
| AQUYNZA construye sus sistemas de control a partir de especificaciones de SENSORes, ACTUADORes y CONTROLADORES que se leen desde un archivo .aqz. | |
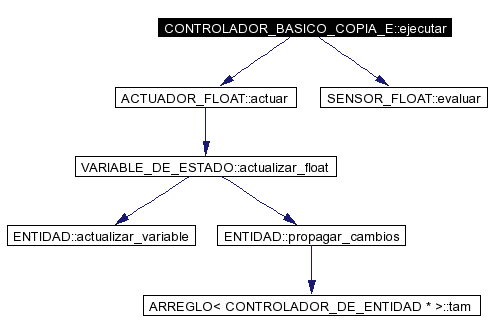
| void | ejecutar (void) |
| El comportamiento esperado es el siguiente: - El valor de origen se copia exactamente al destino. | |
Atributos privados | |
| SENSOR_FLOAT * | Sensor_origen |
| ACTUADOR_FLOAT * | Actuador_destino |
| char * | Nombre_sensor_origen |
| char * | Nombre_actuador_destino |
|
|
La constructora desactiva todas las propiedades del controlador. Dichas propiedades deben ser activadas por el usuario modelador en un archivo .aqz, que sera cargado en el metodo `leer`. Definición en la línea 86 del archivo controlador.C. References Actuador_destino, Nombre_actuador_destino, Nombre_sensor_origen, y Sensor_origen. |
|
|
El comportamiento esperado es el siguiente: - El valor de origen se copia exactamente al destino.
Implements CONTROLADOR. Definición en la línea 192 del archivo controlador.C. References Actuador_destino, ACTUADOR_FLOAT::actuar(), SENSOR_FLOAT::evaluar(), y Sensor_origen. |
Here is the call graph for this function:
|
|
Lee la configuracion del controlador a partir de un archivo .aqz. En esta fase del proceso de creacion solo se determinan los nombres de los sensores y actuadores necesarios, que solo se determinan en hasta llamar el metodo `resolver`. Implements CONTROLADOR. Definición en la línea 100 del archivo controlador.C. References Nombre_actuador_destino, Nombre_sensor_origen, TOKENIZADOR::siguiente_token(), TK_ABRIR, TK_CERRAR, TK_DESCONOCIDO, y TK_IDENTIFICADOR. |
Here is the call graph for this function:
|
||||||||||||
|
AQUYNZA construye sus sistemas de control a partir de especificaciones de SENSORes, ACTUADORes y CONTROLADORES que se leen desde un archivo .aqz. Dado que la sintaxis no exige que el modelador declare dichos componentes en ningun orden particular, es necesario cargar primero todo y luego encadenar los componentes. Dada las listas con sensores y actuadores precargados, este metodo se encarga de encadenar el controlador con sus partes para formar un sistema de control completo. Notese que se esta tarea se realiza en 4 pasos:
Implements CONTROLADOR. Definición en la línea 141 del archivo controlador.C. References Actuador_destino, Nombre_actuador_destino, Nombre_sensor_origen, Sensor_origen, T_FLOAT, y LISTA< T >::tam(). |
Here is the call graph for this function:
|
|
Definición en la línea 57 del archivo controlador.h. Referenciado por CONTROLADOR_BASICO_COPIA_E(), ejecutar(), y resolver(). |
|
|
Definición en la línea 59 del archivo controlador.h. Referenciado por CONTROLADOR_BASICO_COPIA_E(), leer(), y resolver(). |
|
|
Definición en la línea 58 del archivo controlador.h. Referenciado por CONTROLADOR_BASICO_COPIA_E(), leer(), y resolver(). |
|
|
Definición en la línea 56 del archivo controlador.h. Referenciado por CONTROLADOR_BASICO_COPIA_E(), ejecutar(), y resolver(). |